A simple robot arm - worked example
Here is a worked example of the algorithm I came up with to solve the problem I discussed here (they show more how it works in theory than in practice; in practice, quite a few of these steps can be left out).
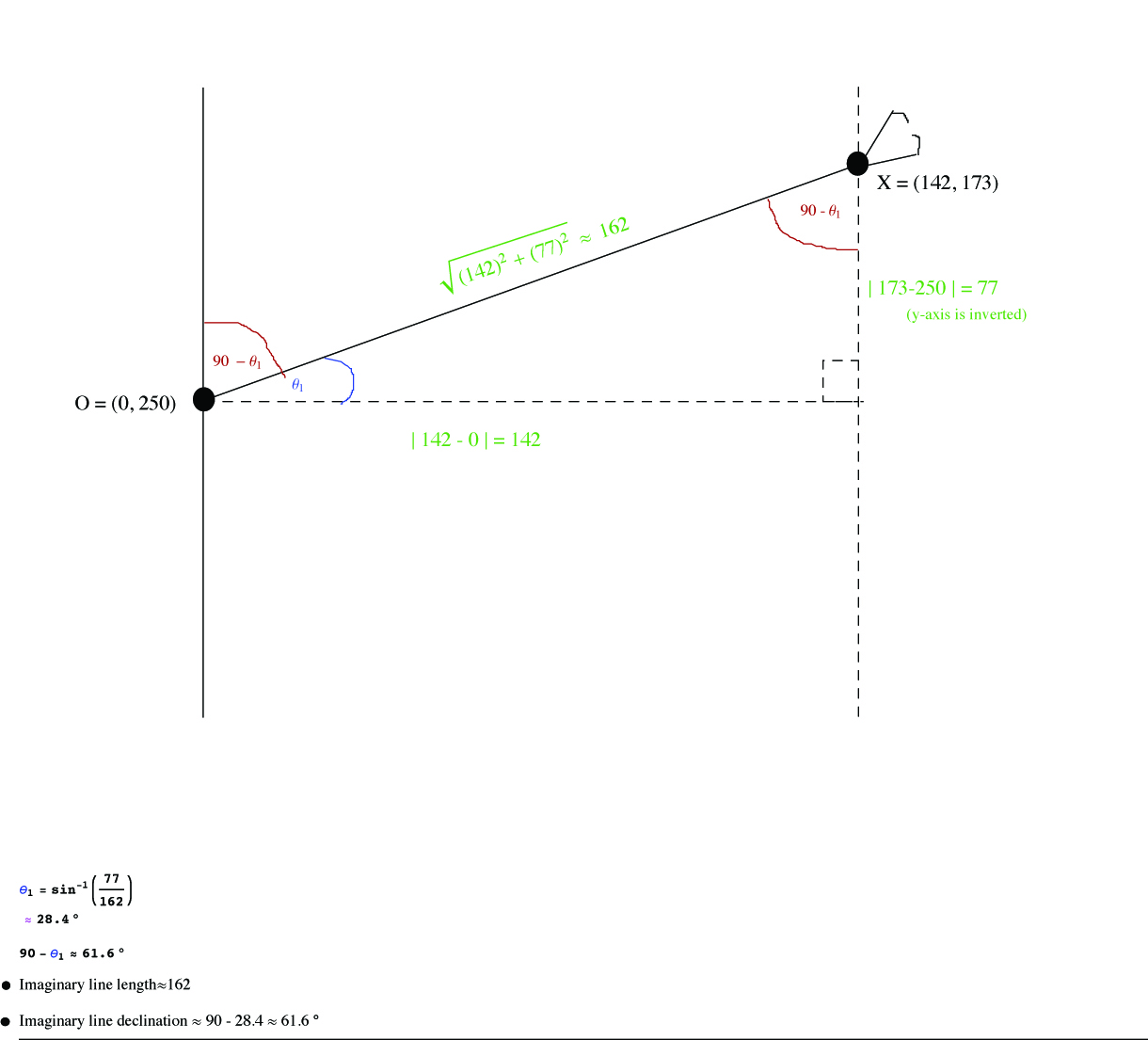
Part 1
Part 2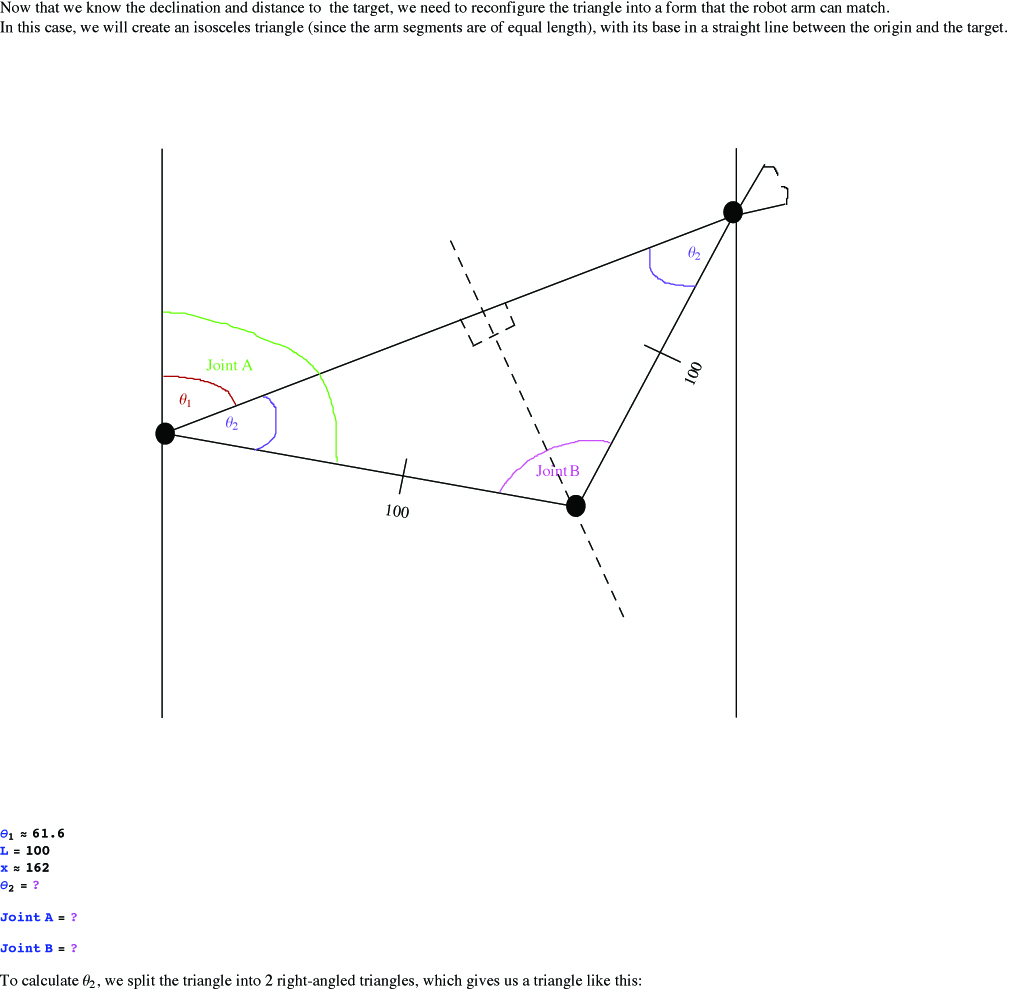
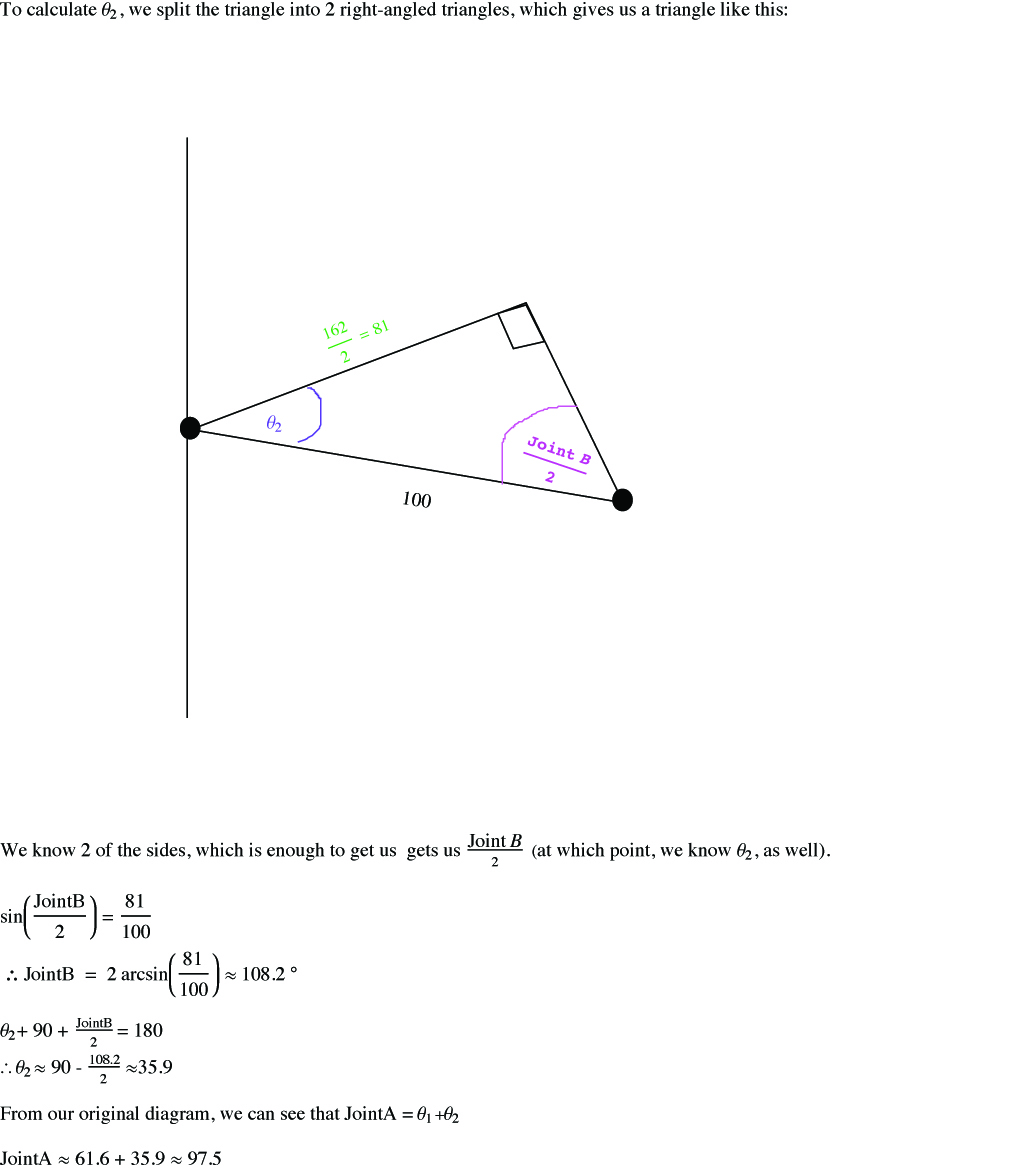
Part 3
Sorry about the JPEGs, but hosting a Mathematica CDF in the page turned out to be a pain in the arse.
Comments